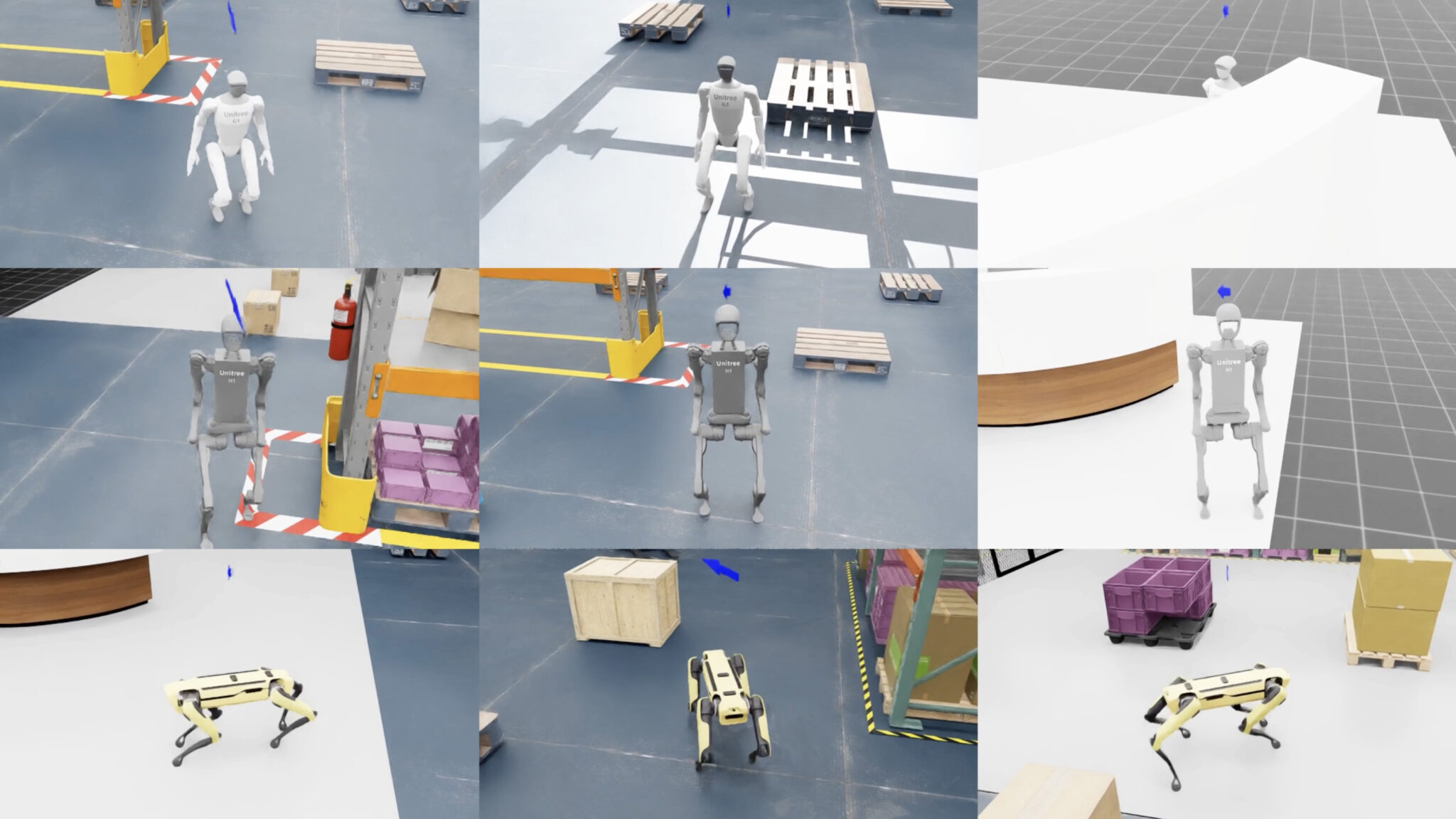
Robotics is entering a new phase: moving from controlled demos and scripted automation toward generalizable, reliable embodied autonomy in the real world. At the International Conference on Robotics and Automation (ICRA) , eight of NVIDIA Research’s 28 accepted papers show how simulation-to-real transfer is becoming a foundation for that shift, helping robots perceive, reason, plan and act across dynamic, unpredictable environments. Together, the papers span the full stack of challenges robot developers face: coordinating multiple arms in parallel, building policies that generalize across robot bodies, grasping novel objects in clutter, performing precise assembly and developing vision-language-action models that reason before they move. The throughline is clear: sim-to-real is becoming a foundation for robots that can adapt, generalize, and operate with greater reliability outside the lab.…